Examples¶
How to Use¶
# import libraries
import compas
from compas.geometry import Frame
from timber_grammar.assembly_model import model
from timber_grammar.id_generator import create_id
from timber_grammar import rhino_UI_utilities import utils
print("Test 1: Create beam and save and load model to JSON")
#Load Derivation and model
derivation = Derivation.from_json(rhino_UI_utilities.get_json_file_location())
model = derivation.get_next_step()
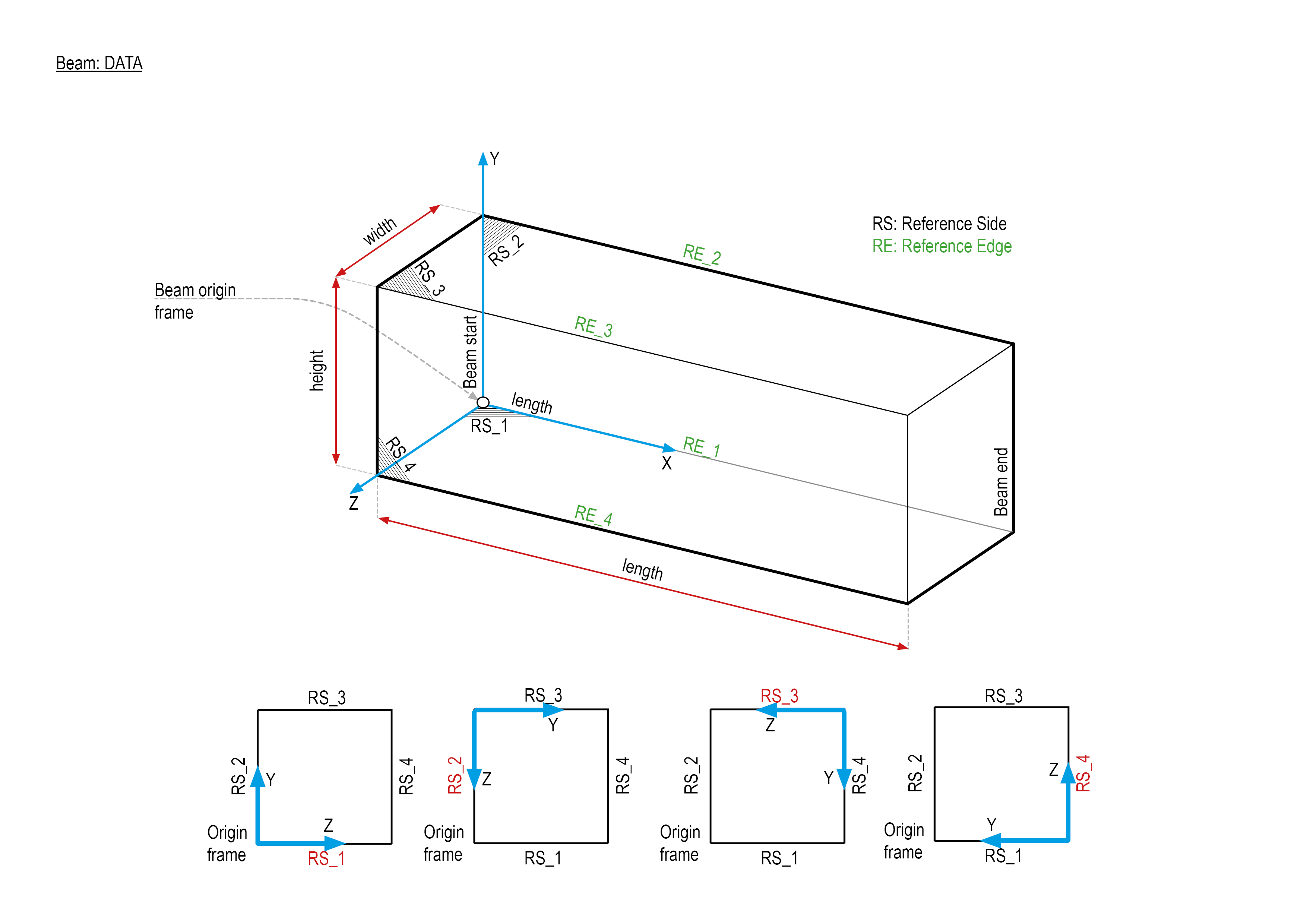
# dimensions
frame = Frame.worldXY()
length = 1000
width = 100
height = 100
name = create_id()
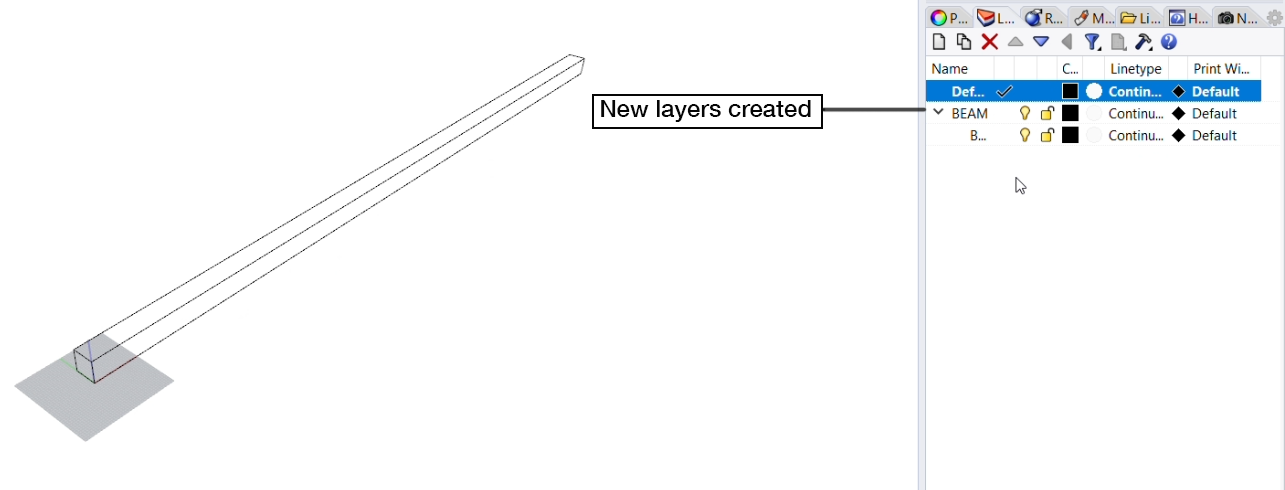
# create beams as planes
model.rule_create_beam(frame,length,width,height,name)
#save Derivation
derivation.to_json(rhino_UI_utilities.get_json_file_location(), pretty = True)
# Visualization
artist = MeshArtist(None, layer ='BEAM::Beams_out')
artist.clear_layer()
for beam in model.beams:
artist = MeshArtist(beam.mesh, layer ='BEAM::Beams_out')#.mesh is not ideal fix in beam and assemble class
artist.draw_faces(join_faces=True)
rule 90 Lap¶
A class 90 Lap joint rule
#find beam instance by name search from model data
selected_beam = None
for beam in model.beams:
if(beam.name == selected_beam_name):
selected_beam = beam
break
assert (selected_beam != None)
#values
face_id = 4
joint_point = Point(100,0,0)
ext_start = 500
ext_end = 1000
name = create_id()
#adding joints to selected Beam
joint_distance_from_start = selected_beam.Get_distancefromBeamYZFrame(joint_point)
match_beam_origin = model.rule_90lap(selected_beam,joint_distance_from_start,face_id,ext_start,ext_end,name)
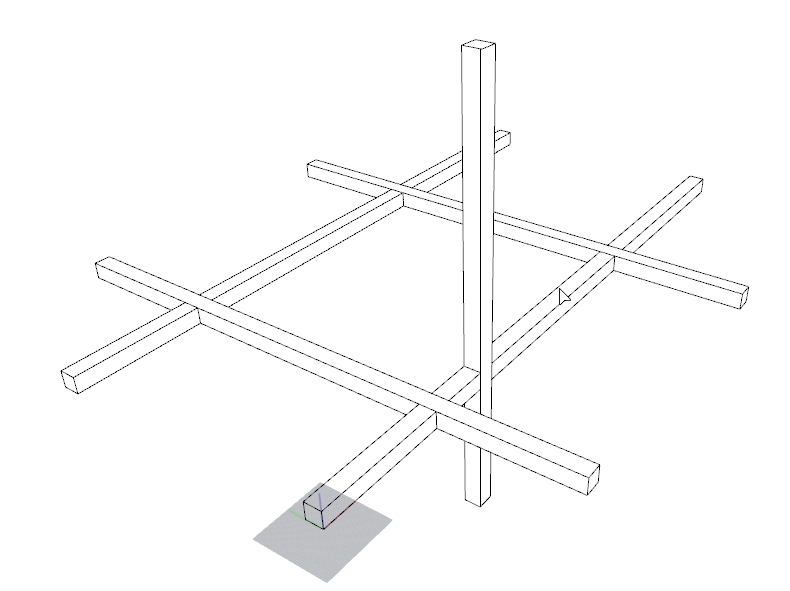
Connect beams¶
A class for connecting beams with a 90 Lap joint
#list of face_ids of coplanar planes
coplanar_face_ids = []
coplanar_face_ids.append(face_id)
for key,value in face_ids_coplanar_planes.items():
if key == ""+str(face_id):
coplanar_face_ids.extend(value)
#project points
projected_point_list = []
new_start_point = project_points_plane([start_point],start_beam_perpendicular_plane)
projected_point_list.extend(new_start_point)
for plane in perpendicular_plane:
new_point = project_points_plane(new_start_point,plane)
projected_point_list.extend(new_point)
#list of distance to move joints on match beam
model.rule_Connect_90lap(selected_beams,projected_point_list,coplanar_face_ids,beam_length,ext_len,create_id())
Derivation class¶
A class for rule derivation history
#load Derivation and delete last step
derivation = Derivation.from_json(rhino_UI_utilities.get_json_file_location())
continue_playback = True
step_id = 0
while(continue_playback):
#ask user for which step they would like to see
derivation_last_step_index = derivation.count - 1
step_id = rs.GetInteger("Enter which step to visualize (0 - "+ str(derivation_last_step_index) + " step) (Enter -1 for last step)", step_id, -1, derivation_last_step_index)
if (step_id == -1): step_id = derivation_last_step_index
if (step_id == None): break # Allow user to quite the command
#load the selected model
model = derivation.get_step(step_id)
step_id = step_id + 1